I am Ronnie, senior at Winston Churchill High School. I am the software lead, responsible for programming the robot. In addition, I aid in the design and fabrication of parts of the robot. I also like to play Minecraft. My favorite nut is the nylock nut!
|
Overview:
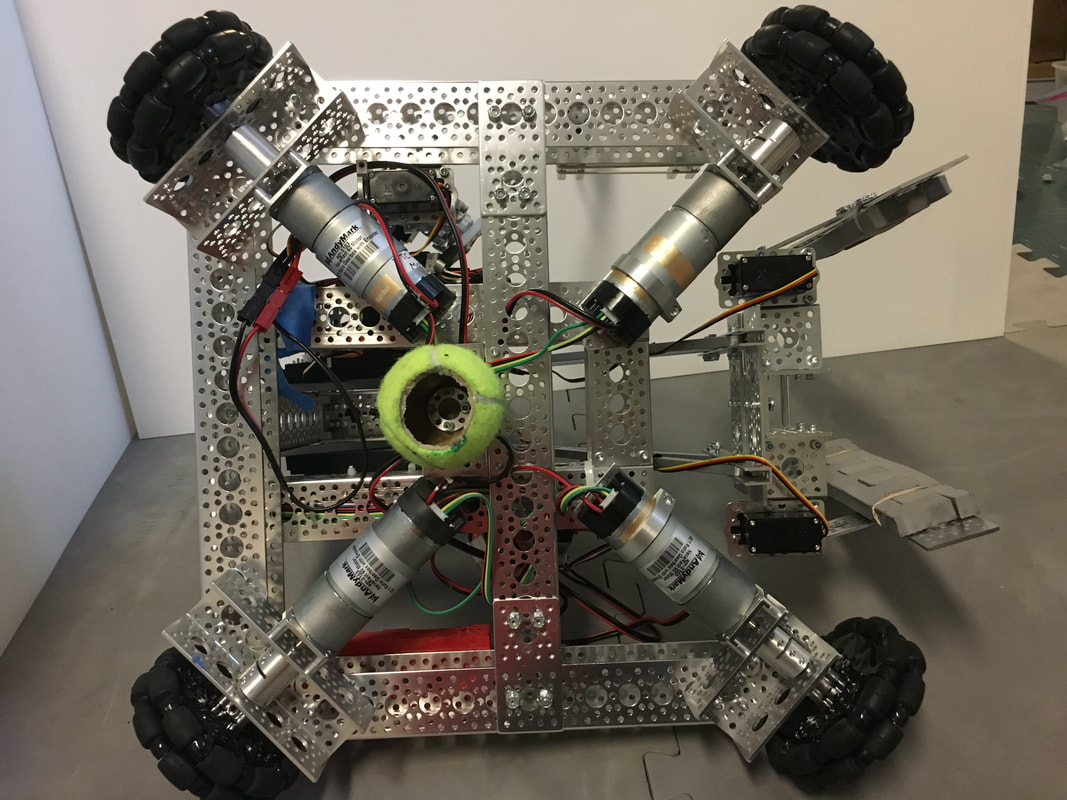
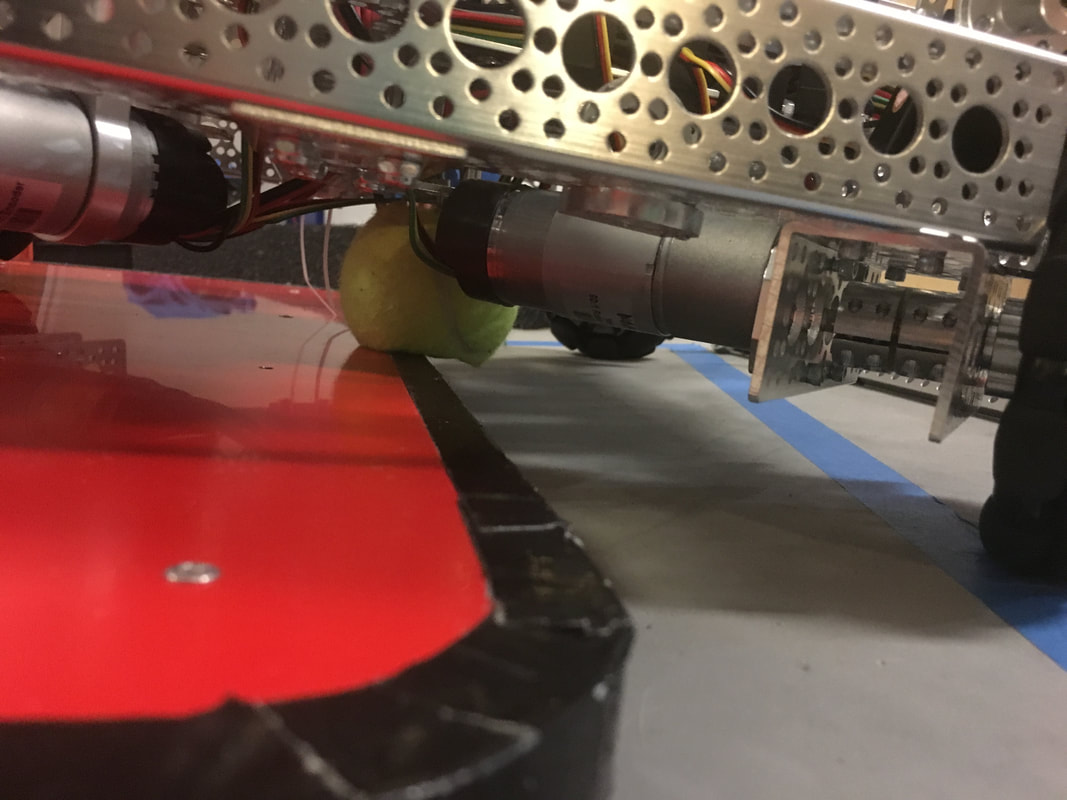
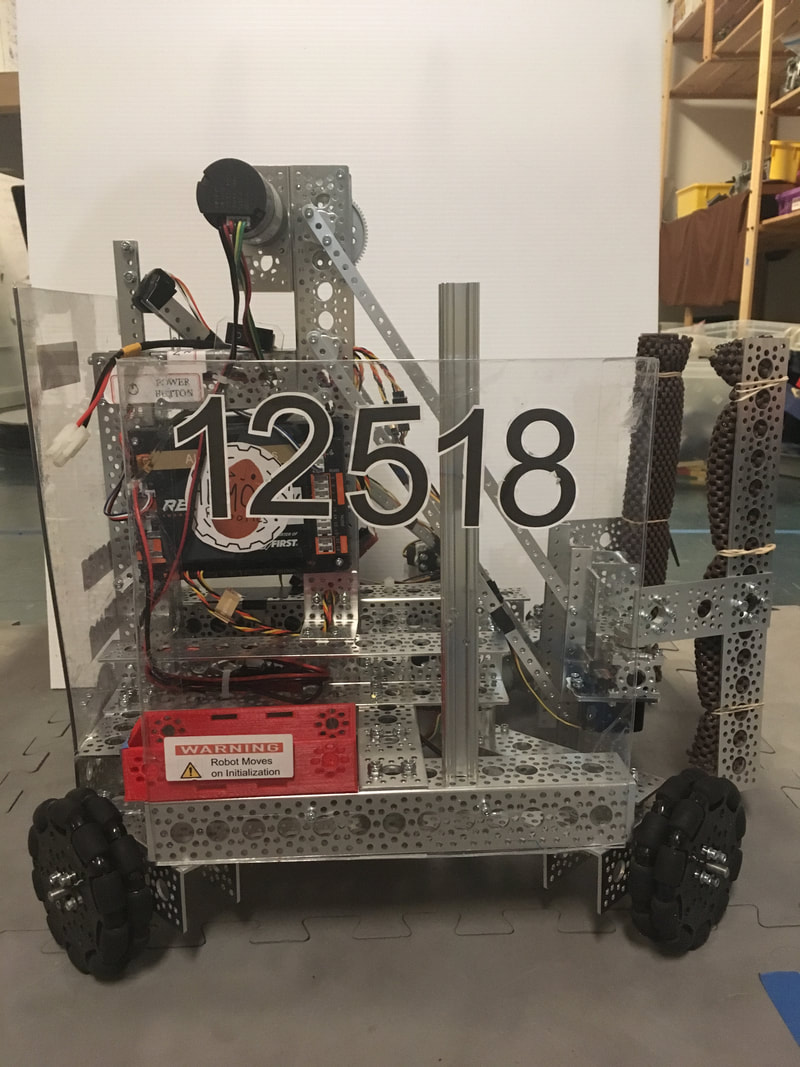
Our robot this season is a holonomic drive with onmi wheels. A holonomic drive is when the wheels are mounted at 90 degrees from each other, instead of a standard tank drive where all the wheels are mounted facing the same direction. We chose this because it allows us to easily maneuver around the field. We also have a direct drive, which is where the wheels are attached directly to the motor, instead of using gears or chain, which can slip, making the robot unreliable. The most innovative feature of our robot is the tennis ball we attached to the bottom. It pushes the balancing stone down, so that the robot can climb it without the motors becoming caught on the edge. |
|
The Claw:
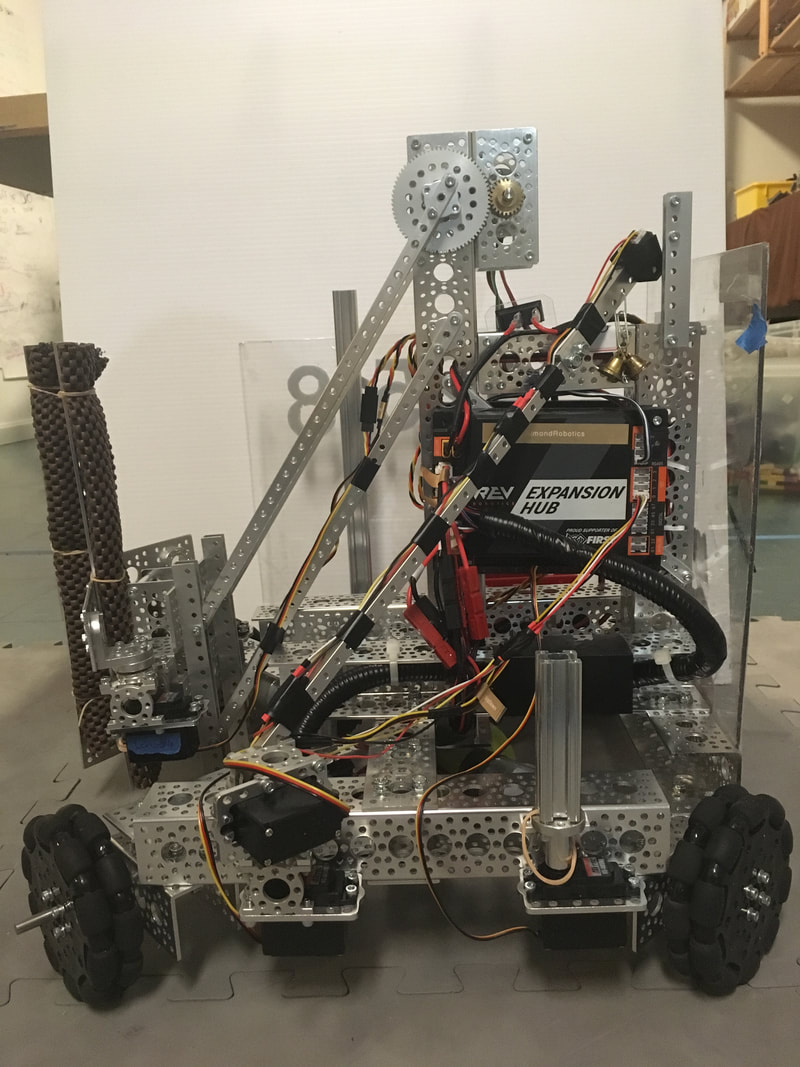
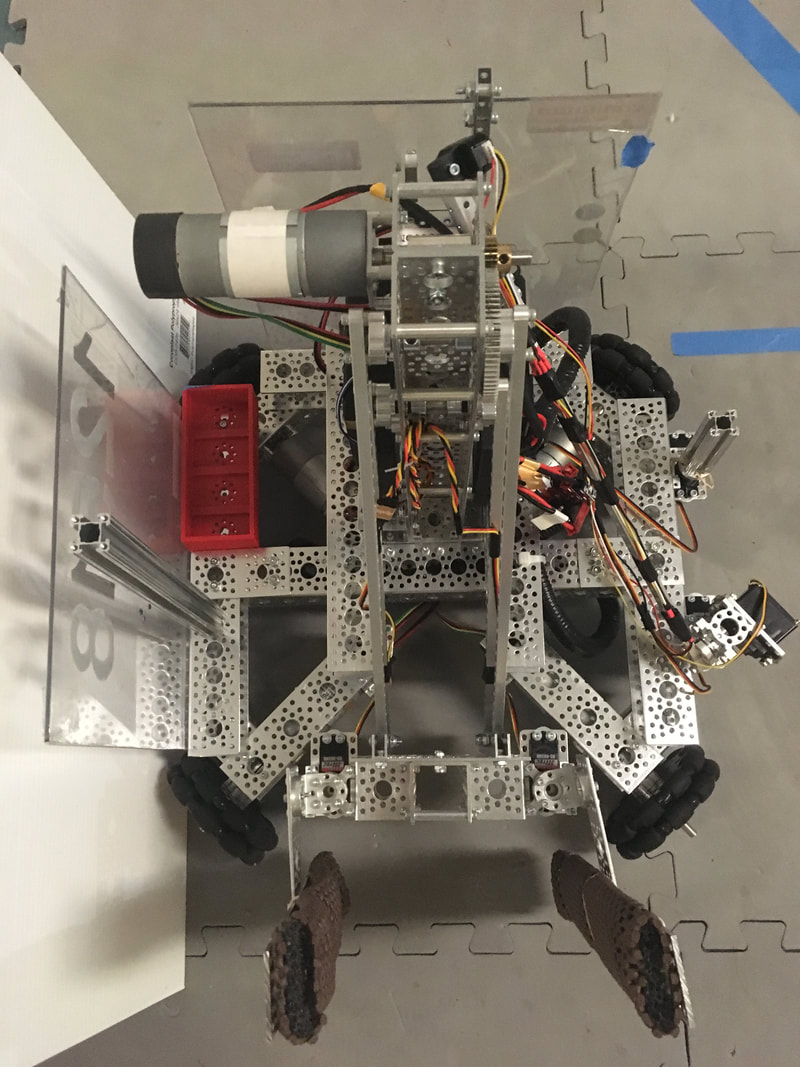
Our main scoring device is a claw to place glyphs in the cryptobox. It is a parallelogram lift, which can move up and down while remaining perpendicular to the cryptobox. For the grippers on the end, we use two simple aluminum sheets to hold glyphs in securely, and can even hold two at a time.
Tele-op:
Our tele-op consists of just scoring glyphs, at our previous competitions our robot has scored an average of 6 glyphs (1 column and 1 row). We are also reliable on the balancing stone during end-games. However, during practice we have started to consistently score a full cipher and the balancing stone in under 3 minutes.
Our main scoring device is a claw to place glyphs in the cryptobox. It is a parallelogram lift, which can move up and down while remaining perpendicular to the cryptobox. For the grippers on the end, we use two simple aluminum sheets to hold glyphs in securely, and can even hold two at a time.
Tele-op:
Our tele-op consists of just scoring glyphs, at our previous competitions our robot has scored an average of 6 glyphs (1 column and 1 row). We are also reliable on the balancing stone during end-games. However, during practice we have started to consistently score a full cipher and the balancing stone in under 3 minutes.
|
Autonomous:
Almond Robotics' strongest point is our autonomous, in which we can score a reliable 85 points. The robot knocks off the correct jewel color, places a glyph in its correct column, and parks in the safety zone. Our robot is able to complete the task 9 out of 10 times. Future plans: We are currently prototyping a new claw, which uses wheels to pull in glyphs. We have made several prototypes out of Legos, and are working towards using 3D printed parts to make the design more lightweight. Additionally, we would like to implement a device to place the relic in the safe zone. We have built a cascading lift, and want to attach it to our robot in the near future. |
|